Autonomous Roving Cargo Carrier (A.R.C.C.)
Senior Design Final Project
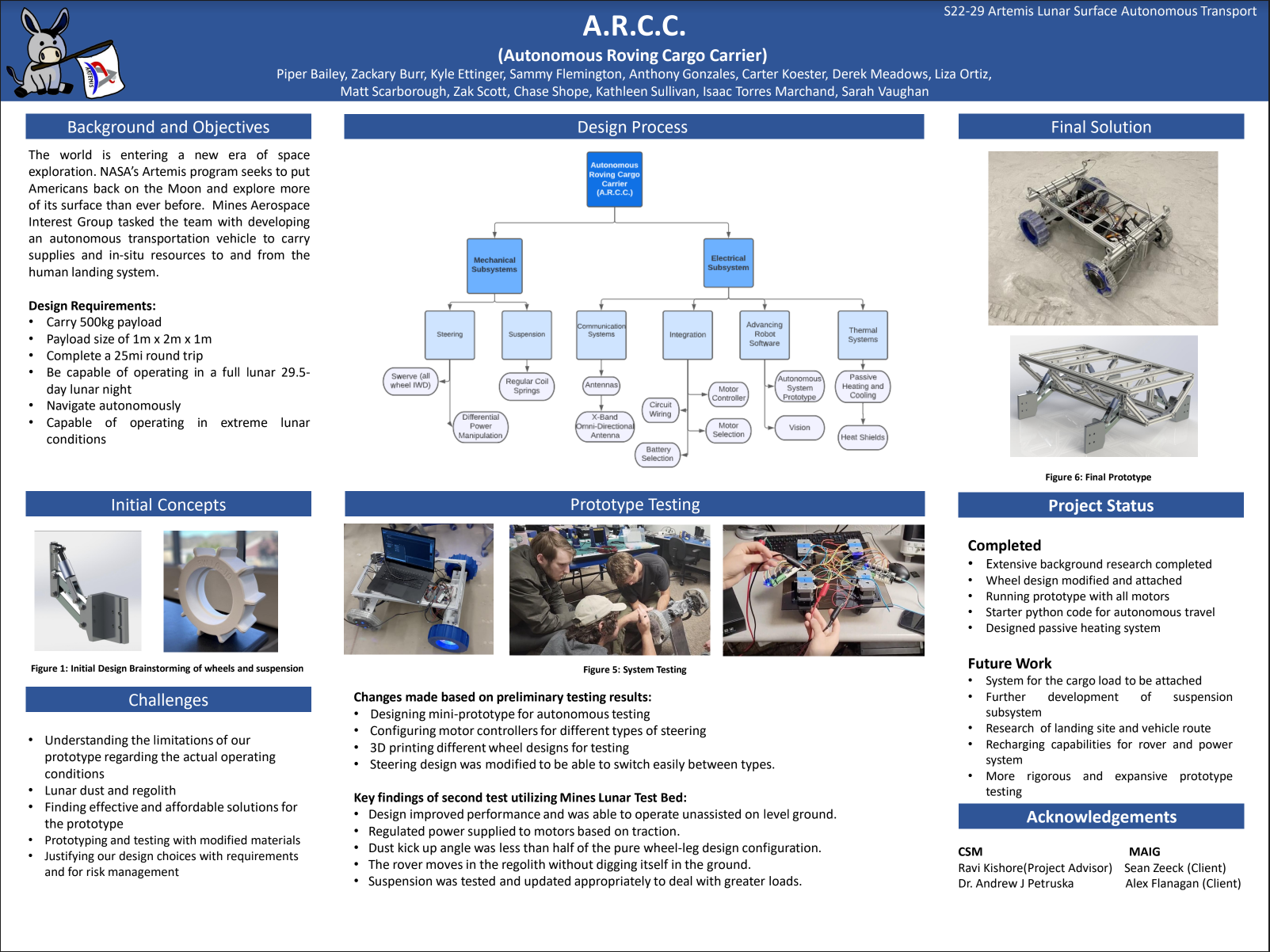
In this Lockheed Martin sponsored project, we were tasked with continuing the work of last year’s team to develop a prototype autonomous cargo carrier for the NASA Artemis missions.
I led the software team to develop the rover’s autonomous navigation and docking systems in Python with OpenCV. Since the construction of the full-size mechanical prototype would take a long time, we built a miniature version (Figure 3.c) to develop our swerve drive and autonomous navigation algorithms in a way that could be easily tested and transferred to the larger prototype when finished. We designed the software in a tiered architecture so that the motor control systems could be easily swapped out for ones suited for the larger prototype’s motor drivers, without affecting the navigation + CV code.